- Hochschule Trier
- Campus wählen
- Quicklinks
-
- English
Das ZIM-KOOP-Forschungsprojekt „OFUS“ (Originäres Fluiddynamisches Umweltgerechtes Spül-Saugsystem), das gemeinsam von UTK-Solution GmbH und der Hochschule Trier durchgeführt wird, hat die Weiterentwicklung von Jet-Lavage-Systemen zur Wundreinigung zum Ziel. Besonderer Fokus liegt auf der Erforschung und Entwicklung neuer Düsengeometrien, die eine bessere Wundreinigung als bisherige Systeme ermöglichen sollen.
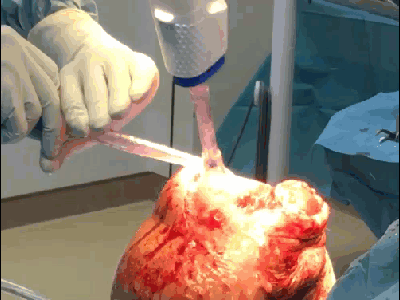
In der Gelenkchirurgie werden Resektionen von Knochen mit oszillierenden Sägen ausgeführt. Dabei entstehen Verunreinigungen durch Blut, lose Gewebepartikel, Fettanlagerungen und Knochenspäne. All diese Verunreinigungen müssen aus dem Situs entfernt werden, um Entzündungen zu vermeiden. Vor dem Einsetzen der Knieprothese ist eine sorgfältige Reinigung des kompletten Operationsfeldes erforderlich, mit der alle Bereiche und Hohlräume mit Kochsalzlösung ausgespült werden.
Ziel des Forschungsprojektes ist die Entwicklung neuartiger Düsenkonzepte mit einer schonenderen Reinigung und einer besseren Reinigungseffizienz. Mittels numerischer Strömungssimulation (Computational Fluid Dynamics, CFD) werden die entwickelten Düsen stömungstechnisch analysiert. Aus diesen Erkenntnissen werden die neuen Düsen-Prototypen weiterentwickelt, als Prototypen hergestellt und der Reinigungserfolg in einem für das Projekt entwickelten Prüfstand getestet. In einem rekursiven Vorgehen werden diese Düsenprototypen ständig weiter verbessert, sodass schließlich eine neue optimierte Düsengeometrie entsteht, die im „Originären Fluiddynamischen Umweltschonenden Spül-Saugsystem“ (OFUS) der Firma UTK-Solution GmbH zur Anwendung kommen wird.

Zur Spülreinigung werden aktuell pistolenartige und batteriebetriebene Jet-Lavage-Systeme eingesetzt, die eine Kochsalzlösung über einen pulsierenden Wasserstrahl in das Operationsgebiet spritzen. Die kinetische Energie des Wasserstrahls löst die Verunreinigungen und Knochensplitter ab, sodass diese mittels Vakuums wieder aus dem Situs abgesaugt werden können. Für eine effektive Aufnahme der Partikel wird die Absaugung innerhalb der Spüllanze geführt, sodass verschmutzte Partikel direkt neben der Düse aufgesaugt werden können. Eine gute Reinigung ist dann gewährleistet, wenn die Absaugung die Spülflüssigkeit nach ihrem Auftreffen auf die Oberfläche und mit den losgelösten Partikeln wieder aufnimmt.

Die UTK-Solution GmbH entwickelte in der Vergangenheit ein neuartiges Jet-Lavage-System, die BlueLavage, sodass eine Trennung von Stromversorgung und Antriebskonzept von dem Absaugsystem ermöglicht werden konnte. So muss nach einer Operation nur noch das Kunststoff-Absaugsystem sortenrein entsorgt werden. Die weiteren, technisch hochwertigen Komponenten können wiederverwendet werden. Für das bisherige BlueLavage System existierten zu Projektbeginn zwei unterschiedliche Düsenarten, die Funnel-Tip-Düse für die oberflächliche Wundreinigung und die Long-Bone-Tip-Düse für die Reinigung von Röhrenknochen.

Von einem Reservoir für Kochsalzlösung (Wasserreservoir) aus, das sich in einer definierten Höhe über der Pumpeinheit befindet, steht Spülflüssigkeit an der Pumpe an. Auf den Pumpenausgang ist ein Drucksensor geschaltet, der den erzeugten Pumpendruck und die Druckverhältnisse zwischen Pumpe und Düse misst. Die unterschiedlichen Düsenprototypen können dann hinter die Pumpe geschaltet und der Düsenstrahl auf die unterschiedlichen Testszenarien, wie den Aufprallkraftsensor (Messung des Strahlimpulses) oder den Knochensimulator (Begutachtung der Reinigungsleistung) gerichtet werden.

Der Knochensimulatortest dient zur Simulation des Lösens und Entfernens von Blut aus einer porösen Knochenstruktur, wie sie in der Tragzone der Röhrenknochen vorkommt. Die Knochensimulatorverfahreinheit besteht aus einem Schlitten, der mit einem Schrittmotor angetrieben wird. Die Softwareansteuerung des Motors ermöglicht ein gleichmäßiges, geradliniges und wiederholgenaues Pendeln unterhalb der Düse sowie das Abfahren unterschiedlicher Bewegungsprofile. Der Knochensimulator selbst ist aus gestapelten Kunststoffplatten aufgebaut, die zentriert übereinander zusammengesetzt werden. Die einzelnen Simulatorplatten weisen Bohrungen unterschiedlichen Durchmessers auf, wobei die Bohrungsmitten aller Platten exakt übereinander liegen. Durch das Übereinanderstapeln der Platten unterschiedlichen Bohrungsdurchmessers können so Kavitäten ähnlich derer im menschlichen Knochen nachgebildet werden.

Zur Ermittlung der Reinigungsleistung werden die Löcher der einzelnen Platten des Knochensimulators mit einem Blutersatzstoff befüllt und unter einheitlichen Versuchsbedingungen per Servopumpe und mit der zu testenden Düse mit Kochsalzlösung bestrahlt, wobei die Knochensimulatoreinheit unterhalb der reinigenden Düse verfährt. Nach der Reinigung erfolgt eine optische Auswertung, und es werden die Messgrößen "Tiefenreinigung", "Oberflächenreingung und Partikelaustrag" sowie die "Effektivität der Absaugung" ausgewertet.

Die am Markt erhältlichen Jet-Lavage-Systeme verwenden einen zentralen Spülstrahl und eine tangentiale Absaugung. Bei einem solchen Konzept wird die Kochsalzlösung zentrisch auf den Operationsbereich gespritzt und von außen abgesaugt. Die Idee des Forschungsprojektes ist, dieses Reinigungssystem umzukehren und über das Verwenden einer radialen Spülung und einer zentrischen Absaugung die Kontaminationen unter die Absaugdüse zu spülen und dort zu entfernen. Dieses Prinzip erlaubt eine effizientere Spülung und Absaugung durch tangential angeordnete Düsen und einen größeren Saugquerschnitt und minimiert so das Risiko der Kontamination des Operationsfeldes.
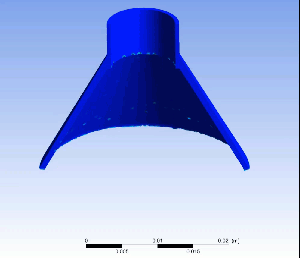
Direkt im Anschluss des Entwurfes einer neuen Düsengeometrie wird diese per numerischer Strömungssimulation (Computational Fluid Mechanics, CFD) auf ihre interne Strömungsführung und die Sprühstrahlcharakteristik analysiert. So können auf Grundlage der aus den CFD-Rechnungen extrahierten detaillierten Strömungsgrößen, die einer direkten Messung nicht zugänglich sind, unmittelbar Modifikationen und Verbesserungen für die nächste Düsengeometrie abgeleitet werden. Die hierfür notwendigen Simulationsmodelle werden entsprechend der dafür vom Softwarehersteller empfohlenen Einstellungen aufgesetzt, in Vorstudien auf Plausibilität überprüft und im Anschluss mit praktischen Versuchen auf dem Prüfstand validiert.
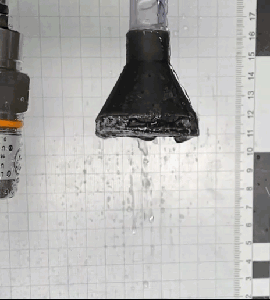
Alle neu etwickelten Konzepte wurden in der Fluidsimulation geprüft und optimiert, danach wurden jeweils Prototypen hergestellt und diese auf dem Prüfstand auf ihr Sprühbild und ihre Reinigungsleistung in vier verschiedenen Testarten überprüft. Die Testergebnisse der Prototypen wurden miteinander verglichen, und in einem rekursiven Vorgehen wurde die Düsengeometrie immer weiter verbessert. Das Bild zeigt einen der frühen Ringdüsen-Prototypen im freien Prüfstandstest ohne Absaugung zur Beurteilung der Strahlgeometrie. Weitere Tests mit der Prallplatte und dem Knochensimulator schließen sich diesem ersten Test an.

Die UTK-Solution GmbH stellte ihr BlueLavage-Spülsystem auf der MEDICA 2019 aus. Auch die ersten Prototypen der Hochschule Trier des in der Entwicklung befindlichen Ringdüsenkonzepts wurden als innovative Verbesserung in einem Messevortrag vorgestellt, und ein Ringdüsen-Prototyp konnte vom Messepublikum auf dem Messestand getestet werden. Auch das Forscherteam der Hochschule Trier präsentierte die Forschungsergebnisse, die zur Entwicklung der Prototypen beigetragen haben, am Messstand.

Kooperationsprojekt im Programm "Zentrales Innovationsprogramm Mittelstand (ZIM)"
Gefördert durch das Bundesministerium für Wirtschaft und Energie aufgrund eines Beschlusses des Deutschen Bundestages
Förderkennzeichen: ZF4478602TS7

Weitere Informationen finden Sie auf den Seiten zu Forschungsprojekten der Hochschule Trier.

Hier können Sie einen Flyer mit einer Übersicht über das Projekt downladen. Klicken Sie auf diesen Link

Sie verlassen die offizielle Website der Hochschule Trier
Schneidershof
Gebäude A - C | Maschinenhalle M
D-54293 Trier